Torque vectoring is a strategy used to get power to any wheel on a vehicle almost instantly without having to cut engine power or utilise the brakes, as is the case with ESP (Electronic Stability Program) or ‘Brake-based Vectoring’ where torque distribution is controlled by braking a wheel.
In simple terms, it's like having a super-fast, computer-controlled LSD (Limited Slip Differential) on each axle.
Torque vectoring differentials were first seen in rally applications, with Mitsubishi recognised as pioneers in the field, followed by the integration of Active Yaw Control in the rear axle of the Evo in the late 90’s.

Fourth Generation Mitsubishi Evolution
Torque vectoring technology has developed over the years to be included in a number of production vehicles and is most commonly found in all-wheel-drive vehicles, however is also seen in a number of front and rear wheel drive vehicles.
As the technology improves and scales, we continue to see it introduced into a wider range of production vehicles including this years (2017) Mazda 6, with the Mazda 3 next to see the technology, followed by the rest of the line-up.

2017 Mazda 6 (US Version)
When we turn the steering wheel of a vehicle, we expect the vehicle to change direction. This is what we know as ‘Yaw’. The vehicle does not respond instantaneously because the suspension and tyres need time to take-up lateral forces.
Often at high speed, the yaw rate of the vehicle after a quick steering input can overshoot the desired outcome before settling to a steady value.
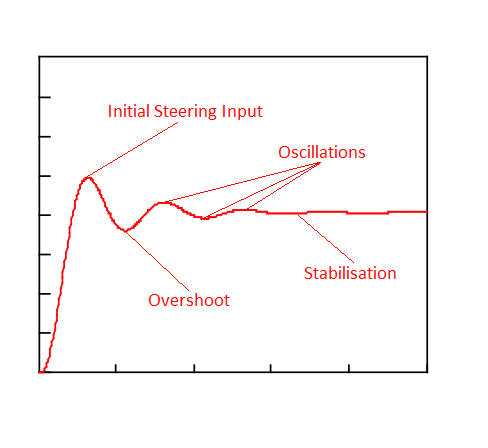
In the instance of very high speeds or poorly tuned suspension, this can cause us to lose control of the vehicle.
Even at low speeds this can require us to make multiple steering inputs to keep the vehicle tracking through a corner correctly.
Typical vehicle suspension is tuned through static settings to minimise these effects and give a stable response over all conditions. This increased stability however, comes at the cost of agility and response.
When we introduce the ability to independently control the torque to each wheel, we are able to increase the vehicle's yaw response and eliminate (or at least drastically improve) the trade-off between agility/response and stability.
The secret of torque vectoring lies within specially designed differentials.
Whilst a conventional differential typically only requires mechanical components, a torque vectoring differential utilises electronics as well.
Whilst there are a number of different strategies and variances in designs between vehicle manufacturers, we will take a look at the most common implementation of torque vectoring.
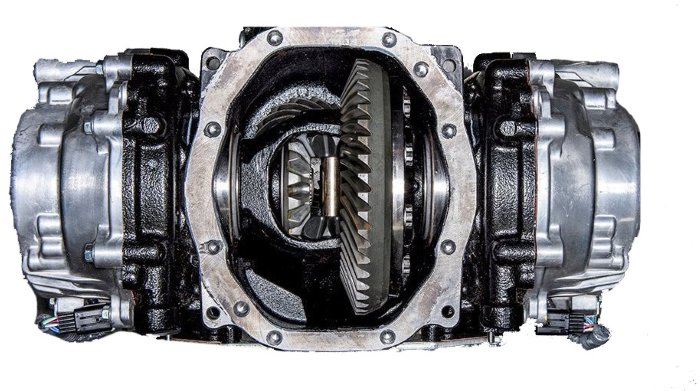
Rear view of a differential showing the clutch packs and gearsets for each axle, either side of the housing.
A system equipped with torque vectoring typically resembles a standard type differential, however each axle is accompanied by a clutch pack, planetary gearset and control motor.
A control unit monitors vehicle inputs such as the accelerometer, gyroscope, steering angle sensor and wheel speed sensors in order to modulate the torque to the wheels . This information is used to determine if and when the vehicle is cornering and the severity of the corner so it can determine whether to dampen or accelerate the yaw.
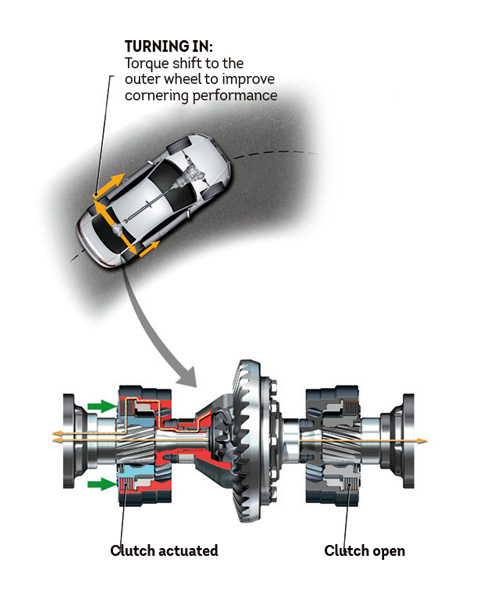
For example, let's say we are hanging a sweeping right hand bend at high speed.
We want to send more torque to the outside rear wheel while cornering to push the vehicle into the corner giving us more maneuverability.
In some situations (depending on the application) all of the available torque can be diverted to one side of the vehicle.
Torque vectoring systems can also switch maximum power from one rear wheel to the other within milliseconds which allows us to cope with corners in different directions right after one another.
This strategy is far superior to a typical system with Brake-based Vectoring or ESP (Electronic Stability Program) that reduces the speed of the vehicle or applies more braking force to the inside wheels.
Torque vectoring requires at least one overdrive gear in the differential (although there are usually two) that are able to spin the wheels faster than if they were driven through a conventional diff.
When engaged, the clutch packs connect the overdrive gears to the differential output, which varies the clamping force to adjust the thrust between each wheel. Because the clutches don’t fully engage, the outside wheel doesn’t actually turn faster. Instead, the partially meshed overdrive gears provide a push, like paddling harder on one side of a row-boat.
Some systems can adjust the torque delivered at each wheel more than 100 times per second!
