
We have all heard and read it a thousand times before, but it bears repeating; modern vehicles are becoming more complex, but they are also becoming safer to use as a result of their becoming more complex. Most of us have also lived through new types of diagnostic challenges resulting from the increasing complexities of modern versions of multiple ADAS systems. Moreover, although many manufacturers of diagnostic equipment continuously strive to translate new and complex automotive technologies into relatively user-friendly test procedures to diagnose issues in said new, and complex automotive technologies, car manufacturers seem intent on releasing new and/or improved technologies at an ever-increasing pace.
This writer is not against new or improved technologies that make cars safer to use. However, a recent encounter with a new high-end German-made car that, according to its discombobulated owner, sometimes developed a mind of its own, made this writer ponder the question of why car manufacturers do not provide buyers of their products with comprehensive documentation about how the ADAS systems that are installed in the products people buy are expected to behave.
Maybe this is one of those questions that does not have an answer, but if the owner of this new German-made car knew that the car was behaving as expected, and was not “possessed”, he would not have been as afraid to drive it as he was. In this article, we recount the tale of the “possessed” car, and also provide a general overview of two electronic control systems that are fast replacing the mechanical systems we are used to seeing. Before we get to specifics, though, let us state-
As a former regular and long-standing customer of this writer, the owner of the new car firmly believed that this writer and his (former) staff were all magicians that could fix anything, which is why he brought the car to this writer’s former workshop, instead of taking it to the dealership he’d bought the car from.
When we asked him about this, he said that he did take the car to the dealership, which test-drove it and told him that the car was behaving “as it should”. According to the dealership, there was nothing wrong with the facts that a) the car sometimes veered towards the “middle of the road” while driving at speeds above 50 km/h, and b) that the car sometimes also seemed to apply the brakes automatically when it “veered into oncoming traffic”.
According to the owner, however, there must be something wrong with the car, so would we mind taking a look since the dealership could not, or would not address his concerns? He also said he would take up any subsequent warranty issues with the dealership if we had to repair or replace anything.
Somewhat intrigued, we agreed to accept the job because this job might teach us something, and arranged for a rental vehicle so the owner could get around town. We also promised the owner that we’d let him know what we found as soon as we found it.
With the paperwork out of the way, this writer discussed the job with the resident diagnostician*, who did not think there was anything wrong with the car. Thus, in his usual stoic way, he invited this writer to accompany him on a test drive to see if the car was really trying to kill its driver by driving into oncoming traffic.
* The same diagnostician we have featured here before and who is now one of the new owners of this writer’s former workshop.
The test drive started off well enough. The car ran well, there were no illuminated warning lights on the dashboard, and there were no odd vibrations, sounds, or smells as we entered a stretch of road that usually featured moderate to heavy traffic. Since this particular stretch of road was also a part of our usual “test track” we both knew it well, so we felt would be able to counter any emergencies that might arise when the car started to develop a mind of its own.
Shortly after entering our test track, we both noticed that the adaptive cruise control system seemed to be working as expected since we could feel the system occasionally using the brakes to maintain a distance of about 50 metres between ourselves and the vehicle ahead of us. However, a few minutes later, it happened: the car started veering towards the painted barrier line separating the driving lanes, although it never actually crossed the line and drove into the back of a vehicle in the next lane. At the same time, we could feel a distinct application of the brakes to slow the vehicle down.
The sensation of a vehicle drifting towards the centre of the road was hugely disconcerting, but the steering responded as expected when the diagnostician steered the car back towards the centre of the driving lane. It kept this position for a while and then started drifting towards the barrier line again, although there were no automatic brake applications this time. Again, the car responded appropriately when the diagnostician steered it back towards the centre of the driving lane but this time, the car immediately veered back towards the barrier line when the diagnostician relaxed his hold on the steering wheel.
Neither of us had ever seen this behaviour in a new car, and we were beginning to think that the owner of this particular new car might very well have valid reasons to be afraid of driving it. Nonetheless, as an experiment, we disengaged the adaptive cruise control system and slowed down to well below 50 km/h just to see how the car would behave. At this speed and with the adaptive cruise control system out of commission, the car behaved normally for several kilometres: there was no veering or automatic braking.
Reactivating the adaptive cruise control and accelerating to well above 50 km/h reproduced the symptoms almost immediately, at which point we thought the safer option would be to return to the workshop at speeds well below 50 km/h before the car could decide to actually drive into other cars on the road. This situation needed some careful thinking about before we did anything to any systems or components on the car, but to make a long story short, here is-
Neither of us knew it at the time, but this particular new car was behaving exactly as both designed and intended, as we discovered after purchasing a repair manual from the car’s manufacturer. It turned out that this particular new car was fitted with innovations and refinements to its-
- and others that collectively greatly reduce the possibility of the car crashing into VRUs, which, as we discovered later, translates into Vulnerable Road Users. Here is how this works, but to make things a bit clearer, refer to the image below-

This image illustrates the principles of VRU avoidance, but let us look at this in some detail, starting with the upper half of the frame-
The upper half of the frame is what a driver sees in the road ahead of him, but note the people (circled in red) next to the white SUV that is almost encroaching on the driving lane. These persons are indicated by the green circle in the view that various ADAS systems have of the road ahead.
The lower half of the frame is a graphic representation of what the vehicle “sees" through the "eyes" of the forward-looking cameras, as well as via inputs from sensors associated with the adaptive cruise control system. In practice, forward-looking cameras perform several functions in advanced ADAS systems. The cameras can “see” road markings, as well as interpret road signs such as posted speed limits, but most importantly, these cameras can now also use their binocular “vision” to differentiate between various classes of objects, such as pedestrians (including children), bicycles and motorcycles, trees, lamp posts, mailboxes, and even some types of animals both in the road and along the roadside.
Also, note the blue line in the bottom half of the frame. This line indicates the vehicle’s track in the driving lane, but the most noteworthy aspect of this line is that the greatest deviation from the straight-ahead line occurs next to the persons in the green circle.
This is not by coincidence: this is because the system is programmed to prioritise people i.e. pedestrians, as the most vulnerable class of road users. Thus, while the vehicle starts to veer towards the centre of the road when it reaches the first of the vehicles parked along the road, the vehicle's deviation increases to its maximum safe point when it approaches the persons next to the white SUV to create the biggest possible clearance between itself and the people at the roadside.
At the heart of this system is the electronic power steering system, which uses inputs from various ADAS-related sensors and devices to assume control of the vehicle’s steering to avoid vulnerable road users by as much as conditions allow. The magnitude of the evasive action in this example is indicated by the blue circle. In this case, the electronic power steering system adapted the steering angle from the straight-ahead position by 6.6 degrees, while both the throttle control and brake systems automatically prevented the vehicle from exceeding the posted speed limit on this particular stretch of road, which brings us to-
The most important thing we learned was that the new German-made car behaved exactly as intended- it was programmed to avoid vulnerable road users, and it did exactly that. We also learned that on this particular car, the system only becomes active at road speeds of 50 km/h provided that a) there were no calibration issues with any implicated system, and b) certain classes of trouble codes were not present- including a long list of pending codes.
What we did not notice at the time of our test drive, however, was that the new car veered towards the centre of the road every time we passed pedestrians or other cars parked along the road. We were so discomfited by the car's behaviour that we did not make the connection between the car's behaviour and potential obstacles we could have crashed into.
Thus, both us and the car's owner could perhaps be forgiven for this oversight because none of us knew or was aware that this car could actively identify and classify potential obstacles, and autonomously initiate and execute evasive maneuvers based on how it classified recognizable obstacles. It was a revelation to us all, to say the least.
We described the basic operating principles and capabilities of modern electronic power steering systems in a previous article titled “A New Look at Electronic Power steering Systems”, so we need not rehash that information here. However, we can say that when a modern electronic power steering system is paired with an electronic brake booster to provide increased control of the brakes, the list of possible ADAS applications of this combination becomes almost endless.
One current example of such an application is commonly known as “Active Lane Change Assist”, which uses both electronic power steering and electronically controlled brake boost assist to prevent drivers from making mistakes such as incorrectly judging distances during lane changes, so let us look at-
In practice, electronic brake boost assist is currently available on a few high-end conventional vehicles, but this system is now common on almost all electric vehicles, as well as on most hybrid and extended-range vehicles produced by manufacturers such as GM, Honda, Jaguar, Porsche, Tesla, and the VAG group.
It should be noted, though, that electronic brake boost assist is not a wireless system in the same way that electronic throttle control systems are wireless. In the case of brake boost assist, there is still a mechanical linkage between the brake pedal and the larger brake system, but the boost assist function does not involve engine vacuum in any way. Consider the image below-
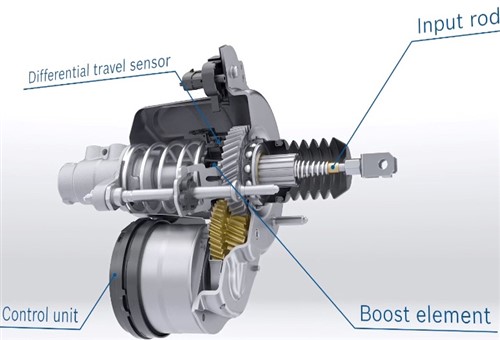
Image source: https://teslamotorsclub.com/tmc/attachments/ibooster_diagram-jpg.658853/
This image shows a cut-away, but greatly simplified view of the second-generation Bosch iBooster that uses a fully reversible brushless 12V DC motor to generate boost assist. Let us look at this in some detail-
Much of this design is self-explanatory, but what is not shown here are details of the actual mechanism aka, the “boost element” that generates brake boost assist. In this design, the DC motor drives a set of worm gears that somewhat resembles a jackscrew that pressurises the master cylinder when the DC motor extends the jackscrew. Here is the short version of how this works-
Note the input rod that connects to the brake pedal: when a driver presses the brake pedal, a pressure sensor measures the input force from the pedal. This force value is then relayed to the brake control module, which then uses highly complex control algorithms and look-up tables that take account of (among many other things) the vehicle’s road speed, the vehicle’s rate of acceleration if it is accelerating, the vehicle’s rate of deceleration if it is slowing down under regenerative braking forces, and the proximity of other vehicles. Based on this calculation, the brake control module will then apply an appropriate braking force by extending the jackscrew, but it is important to note that this system is designed to provide the driver with a “pedal feel” that resembles the “feel” of a conventional braking system.
As a practical matter, a driver can manually select the degree of pedal feel. Nonetheless, in all cases, the system is designed so that a driver experiences a close, if not always an exact correlation between their braking force input on the brake pedal, and the rate at which the vehicle slows down as a result of the brake force input.
As with conventional hydraulic braking systems, the ABS module will prevent wheels from locking up under excessive braking forces on both electric and hybrid vehicles. In practice, the control algorithm will take account of the braking force created by regenerative braking and will, therefore, use inputs from the regenerative braking system and the wheel speed sensors to calculate an appropriate friction braking force to suit the current conditions, which brings us to-
The single biggest drawback of electronic brake boost assist is not so much the fact that it uses an electric motor to work but the fact that this motor requires precisely controlled voltages and currents to prevent brake system failures.
Let us use a vacuum leak as an analogue for voltages and currents. Image for a moment that a conventional brake booster develops a pinhole leak in the hose between the brake booster and the intake manifold. If the leak is small, the brakes will still work, although significantly higher pressures on the brake pedal might be required to stop the vehicle. In the case of an electronically controlled brake booster, however, an input voltage that is just marginally out of spec could cause the motor not to extend or retract the jackscrew as expected, which amounts to a brake system failure in both cases.
So, the brakes could fail in two ways; the booster might not pressurise the master cylinder, or it may fail to retract to relieve the pressure in the brake system, causing the brakes to remain engaged. At the heart of the problem is the fact that no current vehicle has a backup 12V power supply, and although electronically controlled brake boosters can operate on voltages that deviate from their nominal design voltages, the maximum allowed deviations are very small.
We need not delve into the complexities of the circuits that supply electronic brake boosters with their power here, but suffice it to say that discharged or defective 12V LSI batteries and malfunctions in DC-to-DC converters that function as alternators on many hybrids typically produce abnormal 12V-system voltages. Moreover, since electronically controlled brake boosters are particularly susceptible to the effects of abnormal system voltages, there is a high likelihood that vehicles using electronic brake boosters could experience the loss of the friction-based brakes when abnormal 12V-system voltages occur for whatever reason(s).
Note that, although regenerative braking can generate up to about 90 per cent of an electric vehicle’s braking force, regenerative braking only works on the driving wheels and only when the HV battery pack’s state of charge is low enough for it to accept the additional energy. Moreover, regenerative braking diminishes sharply as the vehicle slows down, which means that in some instances, the vehicle may not have sufficient braking power to prevent an accident if the friction braking system is out of commission or does not work as expected.
So what does the above mean for us, as technicians? It means that brake system failures on hybrid and electric vehicles with electronically controlled brake boosters can occur for reasons that may not involve the brake system directly. Therefore, we should ideally a) not attempt a diagnosis until we have a complete understanding of how the brake systems on these vehicles work and b) not attempt a diagnosis unless we also understand how and why defects in some unrelated systems could potentially affect the operation of the brake systems on these vehicles, which leaves us with this-
There was a time when car manufacturers introduced new automotive technologies at a relatively constant pace, but those days are long gone. Modern cars are now not only evolving at an ever-increasing pace; each new step in the evolutionary ladder also seems to add several layers of complexity to platforms that are already maddeningly complex.
As a result of this, this writer would suggest that it is no longer practicable or possible for us to be generalists. We can longer keep up with new automotive technologies, so it would seem that the only practical way of mastering at least some of the new systems we are seeing is to become experts in one, or at most two fields of car repair if we want to remain both competitive and effective at what we do.
The case of the “possessed” vehicle we describe in this article is a good case in point. The diagnostician is not only an expert in waveform analysis- he is a master at it, but despite his particular field of expertise, he had no idea that the German-made car was capable of autonomous steering under some conditions.
For that matter, neither did this writer, but would you have recognised the car's behaviour as an ADAS functionality unless you were an expert in ADAS systems and their technical implementation?