
In Part 1 of this 2-part series of articles, we discussed the inner workings of the optical cameras that underpin the operation of many ADAS systems. In the second and last installment of this series, we discuss other sensing devices that often complement optical cameras, or provide support to ADAS systems that do not require inputs from optical devices. These systems include, among others, Lane Keep Assist, Park Assist, Adaptive Cruise Control (on some vehicles), VRU (Vulnerable Road User) Avoidance, and Forward Accident Mitigation, all of which use either sound or light waves that humans cannot detect without special instruments. However, while these technologies all work well, they only do so in favourable conditions, but sometimes, they do not work at all in conditions such as low ambient light, or in misty, foggy, or dusty conditions.
Nonetheless, even though many modern ADAS systems and technologies have severe limitations, there is no doubt that ADAS systems have saved thousands of lives, and prevented hundreds of thousands of accidents and injuries across the world in the past decade alone. So, having said that, let us begin by looking at-
LiDAR is an acronym for Light Detection and Ranging and although Lidar devices are not cameras in the accepted meaning of the word, these devices can construct 3D models of the area in front of the vehicle up to about 300 metres or so away. Here is how these devices work-
Conventional high-end LiDAR units transmit one or more “eye-safe” laser beams that reflect off objects in the vehicle’s direction of travel, and a rotating mirror to capture reflected light as it returns to the vehicle. It is worth remembering that since the angle of reflection is equal to the angle of incidence, or nearly so for surfaces that reflect light poorly, the rotating mirror can capture returning light from many angles, which is how the unit constructs 3D models of the area in front of the vehicle.
However, the laser beams are not continuous. The unit transmits short pulses of light, and since the speed of light (300,000 km/sec) is constant and independent of its source (at least, in the human experience) the LiDAR unit measures the time lapse between transmitting the pulse and receiving the reflected echo. Complicated algorithms then factor in the distance that the vehicle had moved since the pulse was transmitted, which calculation yields the distance between the vehicle and the object(s) in its path in real-time, with an accuracy of about 2 centimetres.
More advanced LiDAR systems use solid-state technology that employs up to 128 laser beams that are projected in a fan-like pattern in front of the vehicle. One other major difference between rotating mirror-based LiDARS and solid-state LiDARS is the fact that solid-state LIDARS construct 3D models aka "point clouds" that consist of several billion data points, as opposed to the few hundred million data points in the point clouds that rotating mirrors can construct. As a result, solid-state LiDAR units produce not only vastly more accurate 3D renditions of the area in front of the vehicle but also measure distances to objects to within a few millimetres, as opposed to a few centimetres.
However, while LiDAR technology can detect objects with far greater precision than either RADAR or ultrasound technologies, LiDAR systems suffer from some serious drawbacks. For instance, LiDAR does not perform well in heavy rain, smoke, fog, mist or dusty conditions, nor can LiDAR detect colours, such as those in traffic lights, brake lights, and road signs and/or road markings.
In addition, LiDAR cannot (yet) “read” text on road signs and road surfaces as well as optical and infrared cameras can. On the upside, though, LiDAR systems are not affected by things like varying shadow patterns, darkness, bright sunlight, oncoming headlights, or other sources of bright light since LiDAR systems project their own light at frequencies that are not easily absorbed or scattered by other light sources.
So in practice, LiDAR is often employed in conjunction with optical and/or infrared cameras to maintain a vehicle’s “computer-aided vision” in conditions that hinder the visual acuity of optical cameras, which brings us to-
“RADAR” stands for Radio Detection and Ranging, and in automotive applications, this technology is used to detect objects in front of vehicles that range from a few centimetres in diameter to objects as large as mining dump trucks, in a manner of speaking. Here is how RADAR systems work-
ADAS-grade RADAR systems use transponders that emit radio waves at one of three possible frequencies; 76.5 GHz, 24 GHz, or 79 GHz with the 76.5 GHz frequency being the most common.
Like LiDAR systems, RADAR systems detect radio waves that reflect off objects in the vehicle’s path, and also like LiDAR systems, RADAR systems calculate the distance to objects based on the time lapse between when a signal pulse was transmitted and when the returning echo is detected by the RADAR transponder. However, RADAR systems can also infer the size of an object based on the strength of the returning echo; thus, the stronger the returning echo, the bigger the object and vice versa.
In practice, though, the single biggest advantage of RADAR systems is that the short radio waves they emit can “see” through atmospheric occlusions such as rain, light snow, dust, fog, and low ambient light, which brings us to-

If you are new to the car repair industry in general, and to ADAS systems in particular, you may have wondered what those little round discs, such as the example indicated by the arrow on the rear bumpers of many cars are, and what their purpose is.
The short answer is that these discs are the front ends of ultrasonic sensors that transmit short bursts of sound (when a control module commands them to) at a frequency of around 48 kHz which is about two times higher than the highest frequency human hearing can detect under optimal conditions. As a practical matter, though, the sensors we see on rear bumpers are just the visible ones; other similar and mostly invisible sensors are located at various points in the front, sides, and corners of cars that collectively, provide near 360-degree coverage around the vehicle.
Since these types of sensors work by creating vibrations in the surrounding air, they are most commonly used in low-speed applications such as Park Assist since the low rate of airflow around and over the vehicle does not affect the propagation of sound waves at low vehicle speeds. Nonetheless, these sensors work by listening for sound waves that reflect off nearby objects and provided such objects are within about 5 metres of the sensor(s), these systems can measure the distance to such objects with an accuracy of about 4 cm or so.
Note, though, that these systems regard the increasing intensity of returning sound waves as a vehicle reverses or parks itself as being more important than the actual distance to nearby objects as a means of avoiding accidents or potentially damaging contact with nearby objects.
However, while ultrasound-based detection systems offer a vastly more cost-effective option than RADAR or LiDAR systems, the operation of ultrasound-based systems is a) susceptible to interference by noisy environments and b) unable to detect objects that are smaller than about 3 centimetres in diameter.
As a point of interest, it is perhaps worth mentioning that Tesla has found a way to transmit [ultra]sound waves through metal body panels to distances that exceed even the ability of exposed sensors. Exactly how they did this without resorting to using heavy, bulky, and extremely power-hungry sensors is probably one of Tesla's most closely guarded trade secrets but that is perhaps a topic for another time. So instead of speculating on how Tesla’s ultrasound sensors might (or might not) work, let us move on to look at-
Although the large-scale adoption of fully autonomous, self-driving cars is still a long way off, the fact is that many high-end cars on the road today (besides Teslas) already contain the technologies required to drive themselves, with the only thing preventing them from doing so being regulatory approvals.
One such technology involves highly sophisticated satellite interfaces that allow modern vehicles to navigate the world they perceive through cameras and other devices. We know these interfaces as “GPS” or more commonly as “SATNAV (Satellite Navigation)”, and although most of us use this feature regularly, there is a good chance that not many of us fully appreciate just how complex these systems are because they are so deeply integrated into many ADAS systems. Below is the short version of how modern satellite navigation systems work-
In practice, all modern automotive navigation systems use two sets or constellations of satellites. The smallest of these constellations comprises the GPS (Global Positioning System) which consists of just more than 30 satellites that orbit Earth continuously. These satellites provide continuous time and positional data to receivers in vehicles with an accuracy of about one metre, but this level of accuracy is only possible when a receiver is in simultaneous contact with a minimum of four GPS satellites
While one-metre accuracy is sufficient for the talking GPS systems we use to find our way in unfamiliar settings, GPS systems on their own do not work well (if at all) in conditions where signals are obscured or bounced off and/or between tall buildings in crowded cities. Such conditions can confuse navigation modules since the receiver might intercept the same signal multiple times.
To overcome this problem, many modern navigation systems also use time and positional data from two or three constellations of satellites other than the GPS constellation. So, in practice, many modern vehicles are in contact with-
Collectively, these, and other constellations of satellites form [the] GNSS (Global Navigation Satellite System) that provide time and positional data that is accurate to within 2 centimetres. Moreover, since a vehicle can be in contact with a dozen or more GNSS satellites at any given time, obstacles such as tall buildings do not present as big a problem for navigation because the vehicle may remain within the “sight” of multiple satellites as it moves between high buildings.
This is because the different constellations of satellites broadcast information on different radio frequencies, but some frequencies overlap, meaning that when a vehicle loses sight of one satellite, it may be within sight of one or more other satellites broadcasting on a different frequency. Consider the graphic below-
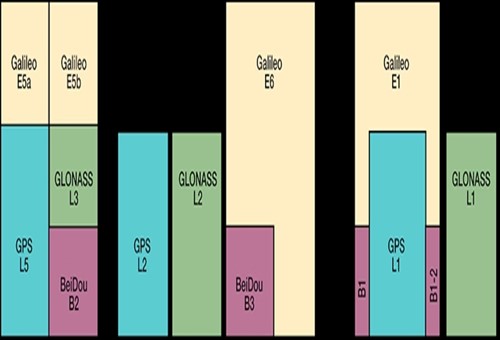
Image source: https://dewesoft.com/blog/types-of-adas-sensors
This graphic illustrates the levels of overlap between the different constellations that make up the GNSS system, but observant readers will notice that on a global scale, the constellation of GPS satellites provides less coverage than the Galileo constellation.
Nonetheless, despite the navigational advantages that the GNSS system offers on relatively open ground, vehicles are blind when they enter underground spaces like parking garages or tunnels. Consider the image below-
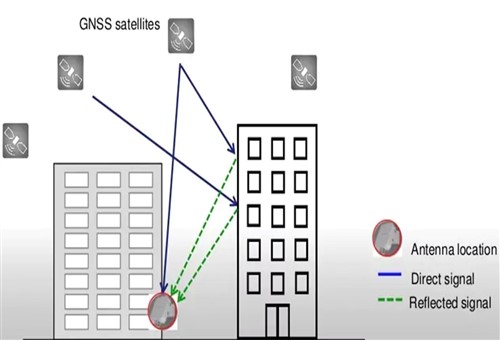
Image source: https://dewesoft.com/blog/types-of-adas-sensors
In such situations, the vehicle loses temporary contact with all the satellites it may have been connected to, but despite this, the vehicle resorts to dead reckoning to calculate its position relative to where it was when it lost contact with the GBSS system. Here is this works-
Most modern vehicles are fitted with specialised GNSS sensors that operate on at least two frequencies and that contain accelerometers and gyroscopes that can operate on at least three axes. Such sensors are also typically fully compatible with GPS, GLONASS, BeiDou, and Galileo GNSS constellations as well as with most ground and space-based GNSS augmentation systems that greatly enhance the accuracy of the larger GNSS system.
So when a vehicle enters, say, an underground parking facility the gyroscopes and accelerometers in the GNSS sensor detect all changes in the vehicle's direction of travel. Based on these changes, the sensor performs highly accurate dead reckoning of the vehicle’s position, and although the accuracy of dead reckoning fades over both time and distance travelled, this system can navigate a vehicle for considerable distances until contact with GNSS satellites resumes.
However, GNSS satellites cannot operate in isolation, in the sense that it is neither designed nor intended to detect obstacles in the vehicle’s path. Therefore, the GNSS navigation system is deeply integrated into other ADAS systems that employ RADAR, LiDAR, various types of cameras, ultrasound, and other technologies that are designed to detect and avoid obstacles that may present a danger to the vehicle and its occupants., which leaves us with-
Although this short series of articles may have given you some new insights into how ADAS senor work, it also helps to bear in mind that all ADAS systems, including GNSS navigation systems, are based on an immutable relationship between the sensors and devices that make any given ADAS system work, and known datum points on the vehicle.
Put differently, this means that every camera, every ultrasound sensor, and every transponder on a vehicle is calibrated with reference to a datum point on the vehicle. Although different ADAS systems on a vehicle are calibrated to different datum points, the point is that no ADAS system can operate as both designed and expected when it is not calibrated correctly with due reference to its various datum points.
So why is this important? You may well ask because calibrating ADAS systems has as much to do with ensuring our customers' safety as it has to with the very real possibility that we may be held liable should an ADAS system we worked on fail to work as expected. Let's take a practical example-
Imagine that you are presented with a vehicle whose Adaptive Cruise Control system has stopped working. In addition, and as expected, several other systems have been disabled because the ADC system is not available, but despite your best efforts, you cannot identify the problem or recalibrate the ADC cameras to within specs- even though you follow the instructions in service information to the letter.
After two days of trying, the impatient customer collects their vehicle and while on their way to a competing workshop to have the problem seen to by someone else, the customer gets into a serious accident because the ABS was disabled when the ADC system stopped working.
So now the question becomes this; did you overlook something? Did you perhaps overlook the fact that the ADC system stopped working because the vehicle’s ride height had changed after the customer fitted slightly bigger wheels? Did you perhaps overlook the fact that while the ADC cameras have not moved with respect to their datum point on the vehicle, the cameras’ perspective on the road has changed?
We all make mistakes and we all overlook some things on occasion. However, in the case of ADAS system calibrations, overlooking the fact that all ADAS systems work from known data points on the vehicle can have devastating consequences not only for our customers but also for our employers and ourselves when we are held liable for an accident because we had overlooked something., which leaves us with this-
According to some reports and studies, more than 90 per cent of road accidents across the world that cause serious injuries and/or fatalities are caused by human error, so in this regard, it is as well to remember that every new development in ADAS technology is aimed at improving the safety of vehicle occupants, which include our customers.
From this perspective, it is incumbent on us as mechanics and technicians to learn as much about ADAS technology as we can because, as the saying goes, "Knowledge is Power", and who among us would not like to have the power to diagnose and repair some of the most complex systems on today's vehicles?